近日,作为首批市住房城乡建设管理委“揭榜挂帅”科研项目,《数字盾构自主掘进关键技术研究及应用》顺利通过科技成果验收。
近年来,市住房城乡建设管理委围绕行业重点关切和发展亟需的技术创新需求,探索科技攻关新机制,选取战略性强、难度高、前景好的科研项目,组织实施了首批“揭榜挂帅”科研项目。

该项目是首个通过科技成果验收的“揭榜挂帅”项目,由上海隧道工程有限公司承担,聚焦数字盾构自主掘进关键技术研究及应用,围绕掘进控制标准化、智能化、系统化等关键技术路径,开展了数字盾构数据标准化、面向自动掘进的知识-数据双驱动控制技术、盾构自主掘进系统开发等研究。
项目开发了数字盾构工程数据标准化技术。针对盾构法隧道施工中面临的地质水文、隧道设计、盾构施工与环境监测等多源异构数据,创新设计了统一的编码规则,形成了一整套盾构法隧道施工数据编码体系,可用于盾构掘进大数据分析和智能模型的快速重构;构建了数字盾构控制全数据链的接口通讯协议和访问频率的规范标准,实现了不同工况条件下多厂商盾构的标准化传输、控制与管理。
项目发明了知识-数据双驱动的盾构机自主驾驶智能控制引擎。针对新建工程数据缺乏难题,创建了时空元模型特征迁移的预测控制算法,提升盾构控制的鲁棒性;发明了可解释的盾构智能决策控制模型,提高智能控制的可信度;发明了基于性能评估的控制模型自学习技术,提高盾构驾驶的控制精度。知识数据双驱动的盾构机自主掘进智能控制引擎控制盾构轴线、地面沉降与施工风险,实现了自适应多变工况的盾构机自主驾驶,有效提升了盾构控制精度与施工质量。
项目发明了盾构机自主驾驶控制系统。首创了面向多重目标的盾构机自主驾驶控制架构,实现复杂环境下盾构机的自适应控制;发明了多智能体协同决策的控制系统,解决各子系统的耦合竞争难题;发明了自主驾驶控制系统快速部署技术,实现不同类型盾构机的产业化应用。数字盾构自主掘进系统保障了盾构自主驾驶技术在常规施工环境下的自主掘进产业化应用。
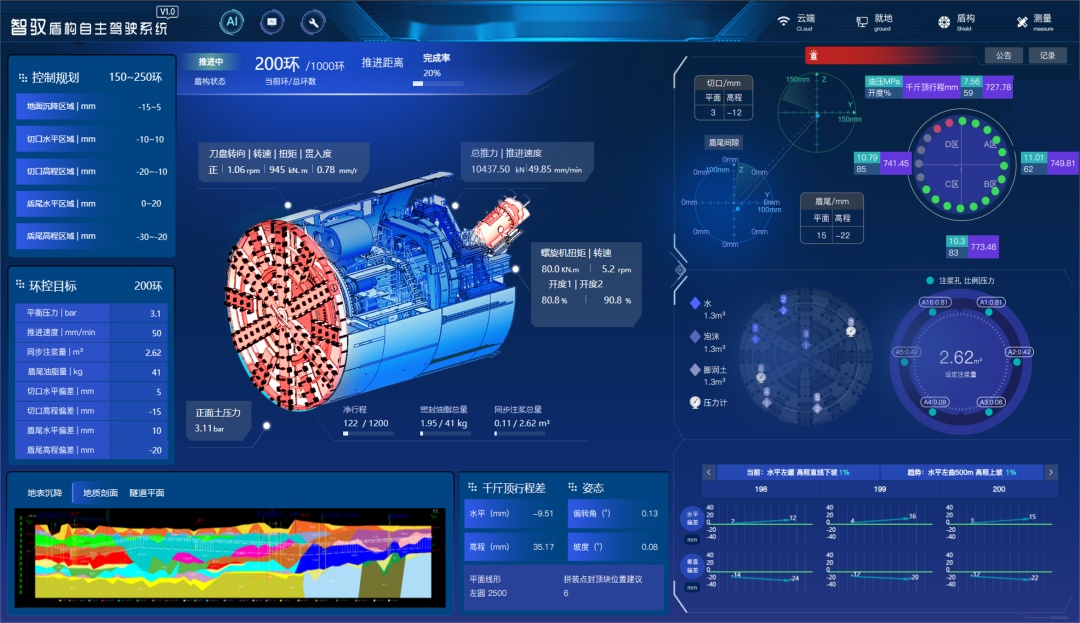
数字盾构自主掘进软件


