编译:高杰
在短跑训练中,
大多数人陷入同一个误区:
拼命模仿博尔特等精英选手的跑姿,
执着于完美摆臂、标准蹬伸、固定步频,
坚信只要复刻“标准答案”,
就能跑得更快。
但发表在《运动医学》的最新研究,
却给出颠覆性结论:
短跑不存在统一的最优技术,
它不是机械复刻动作,
而是人体在多重约束下形成的自组织协调。
真正决定速度的,
不是模仿别人,
而是找到适配自己的最优解。

短跑教学普遍采用“还原论”方法:将完整动作拆解为独立环节(如摆臂、抬腿、着地),通过重复练习各个部分,再组装成完整技术。
但研究指出,这种方法忽略了人体是生物力学、神经生理、心理等子系统构成的复杂自适应系统。
“还原论”
以博尔特为例——这位100米和200米世界纪录保持者身高1.96米,其平均步长达2.44米,而2009年世锦赛同场竞技的对手平均步长仅为2.22米。这意味着博尔特全程比对手少跑近4步。论文明确指出:许多高个子运动员并未取得短跑成功,单纯模仿博尔特的步长参数对普通选手毫无意义。

图源:网易新闻
更关键的是,一项针对52名精英短跑运动员(含9名百米破10秒选手)的研究发现:运动员往往依赖特定步态变量(步长或步频)实现最佳表现,呈现明显的个体差异性。当数据按腿长标准化后,才可能发现趋同原则。这印证了论文的核心论断:群体平均分析可能掩盖个体差异,无法保证提升个体表现。
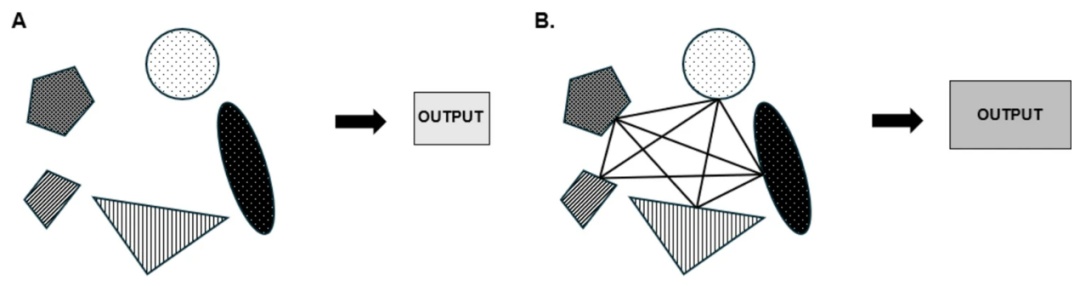
论文引入动力系统理论,将运动员视为复杂适应系统。该理论强调:
▲表现源于系统互动
短跑成绩不是力量、步频等指标的线性叠加,而是机体(身高、肢体长度、疲劳状态等)、任务(目标、器械、教练指令等)、环境(赛道、天气、文化等)这3类约束共同限定了每位运动员的“动作可能性空间”。
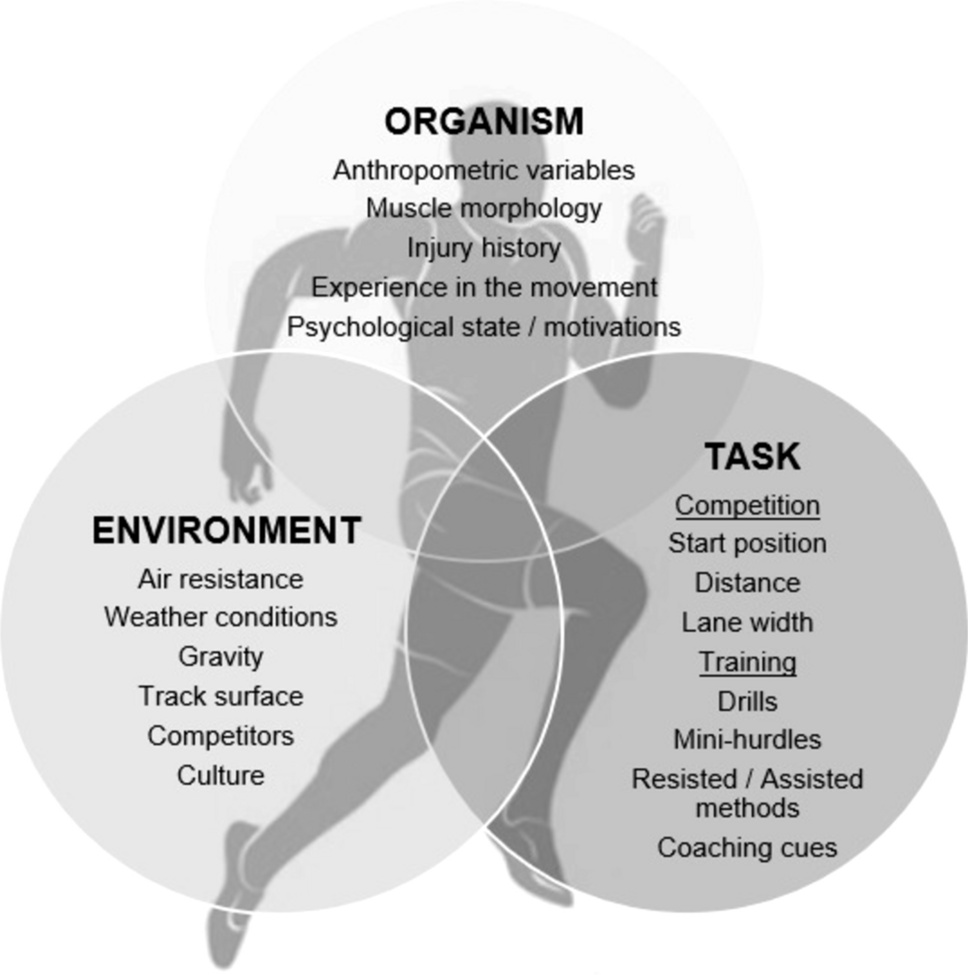
短跑中限制和边界条件的起见图,必须从运动员的角度考虑
▲变异性是功能,而非误差
传统训练把动作波动当缺陷,追求绝对一致。但研究证实,运动变异性是系统自适应的核心。疲劳、场地变化时,身体通过细微动作调整维持效率,变异性让协调更稳定,而非更混乱。
▲自组织涌现,而非被动复制
优秀跑姿不是教练“教”出来的固定模板,是身体在约束下自发形成的稳定状态。就像博尔特凭借1.96米身高形成大步长策略,无需模仿他人,自组织会生成适配个体的最优模式。
系统必须自我组织
论文通过量化研究揭示了不同速度阶段的协调规律:
▲加速阶段:
精英运动员表现出更强的反相大腿主导模式,即双腿能更高效地分离运动(一腿前摆时,另一腿后蹬);次精英选手表现出动作滞后(触地时摆动腿回收较慢),支撑末期又过早前摆,导致重心推进效率下降。
小腿-足部协调存在个体差异:部分选手依赖"胫骨滚动"策略前移重心,直接影响地面发力导向。
▲最高速度阶段:
6周训练后,运动员摆动相策略发生转变:同侧大腿主导比例下降,对侧肢体贡献增加。
更快选手在极短触地时间内采用前馈控制,而非反馈调节,说明协调模式由任务特征和个体能力共同塑造,而非仅由速度决定。
疲劳时呈现矛盾现象:摆动相变异性增加(探索新策略),支撑相变异性降低(冻结自由度维持稳定)。这正是系统自适应的体现。
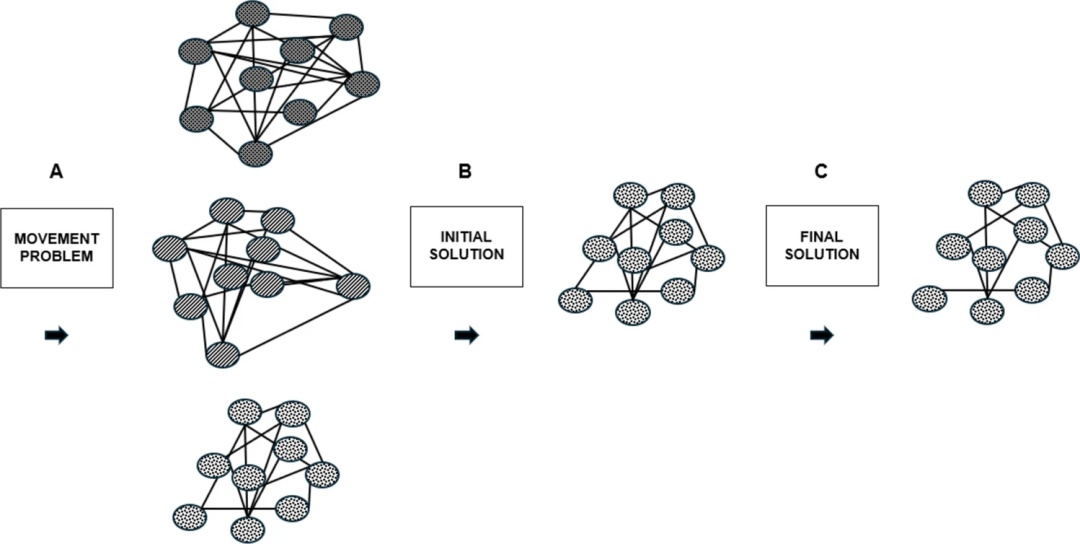
研究结论:短跑不存在通用的最优技术,只有情境依赖的协调策略。

基于动力系统理论,研究提出全新训练思路:不纠正动作,而是设计约束;不消除变异,而是利用变异,让身体自组织出稳定高效的协调模式。
▲差异学习
每次训练刻意加入扰动,如改变起跑姿势、调整节奏、变换负荷等,让系统在波动中探索最优解。研究显示,采用差异学习的运动员在6个月训练后,最大速度提升0.37m/s,而传统重复训练组仅提升0.14m/s。
▲约束引导
调节栏架间距引导步频/步长,避免内部指令(如"抬膝更高"或"用力蹬地"),让运动员在环境互动中隐式适应。
▲个体聚类
用聚类分析识别个体协调类型:步长主导型、步频主导型、平衡型。针对类型设计训练,而非强行套入统一模板。

豆包AI生成
该研究改写了传统短跑认知,短跑的核心不是复刻技术,而是协调适配。人体是动态系统,最优是情境化、个体化的,而非普适标准。
在训练场上,应放下对“标准动作"的执念,创造合适的约束环境,让身体找到属于自己的协调模式。
数据图及参考来源:
https://link.springer.com/article/10.1007/s40279-025-02380-6


